Semantic Segmentation
Fine-scale semantic segmentation of dense 3D point cloud data of road environment obtained by mobile laser scanning.
This project investigated the applicability of the newly manufactured Graphics Processing Unit(GPU) by Cambricon Corp Ltd. to fine segmentation of dense 3D point clouds obtained by Mobile Laser Scanning(MLS).
In this project, I designed algorithms and learning models implemented in python and pytorch to train and validate the results.
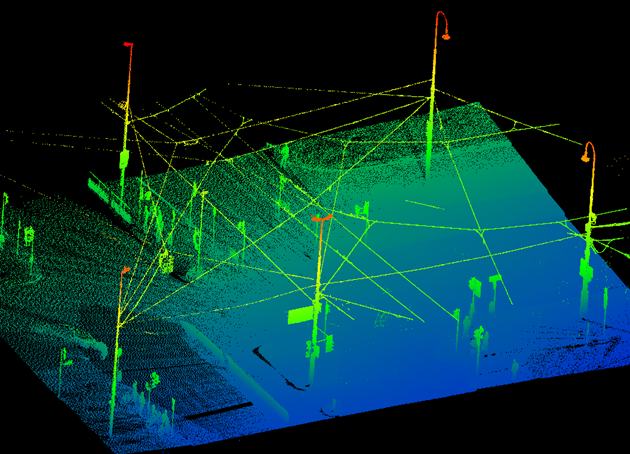
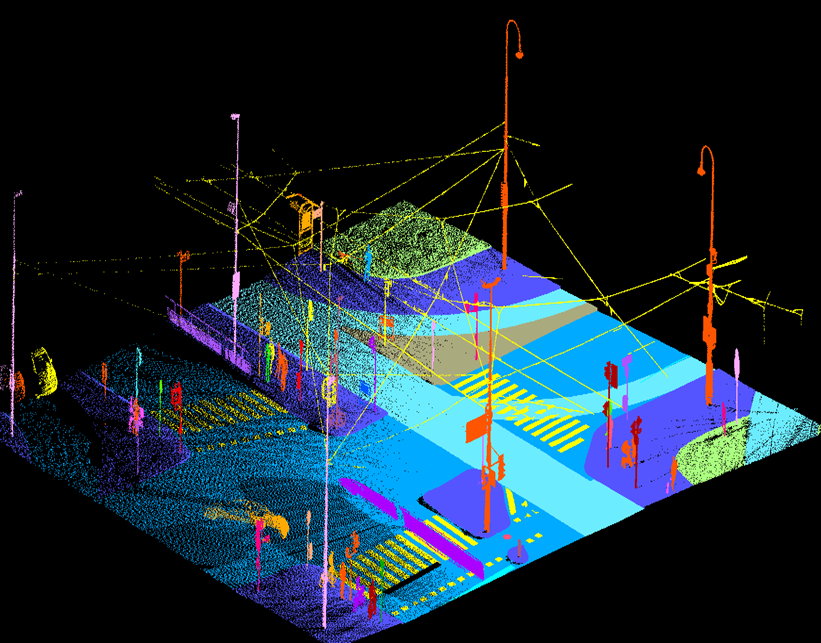
The input of the project is simply raw 3D dense point cloud data (x,y,z,intensity) in a street scenario obtained by a mobile laser scanner. The output is the instances (pedestrian, road signs, poles, road markings etc.) that are properly segmented.
The key element in this work is the scalable kernels composed by an octree structured skeleton for typical objects in street scenarios, such as lamp poles shown as the following figure. The kernel is also a key component in a graph convolution network for the fine segmentation of objects of different scales.
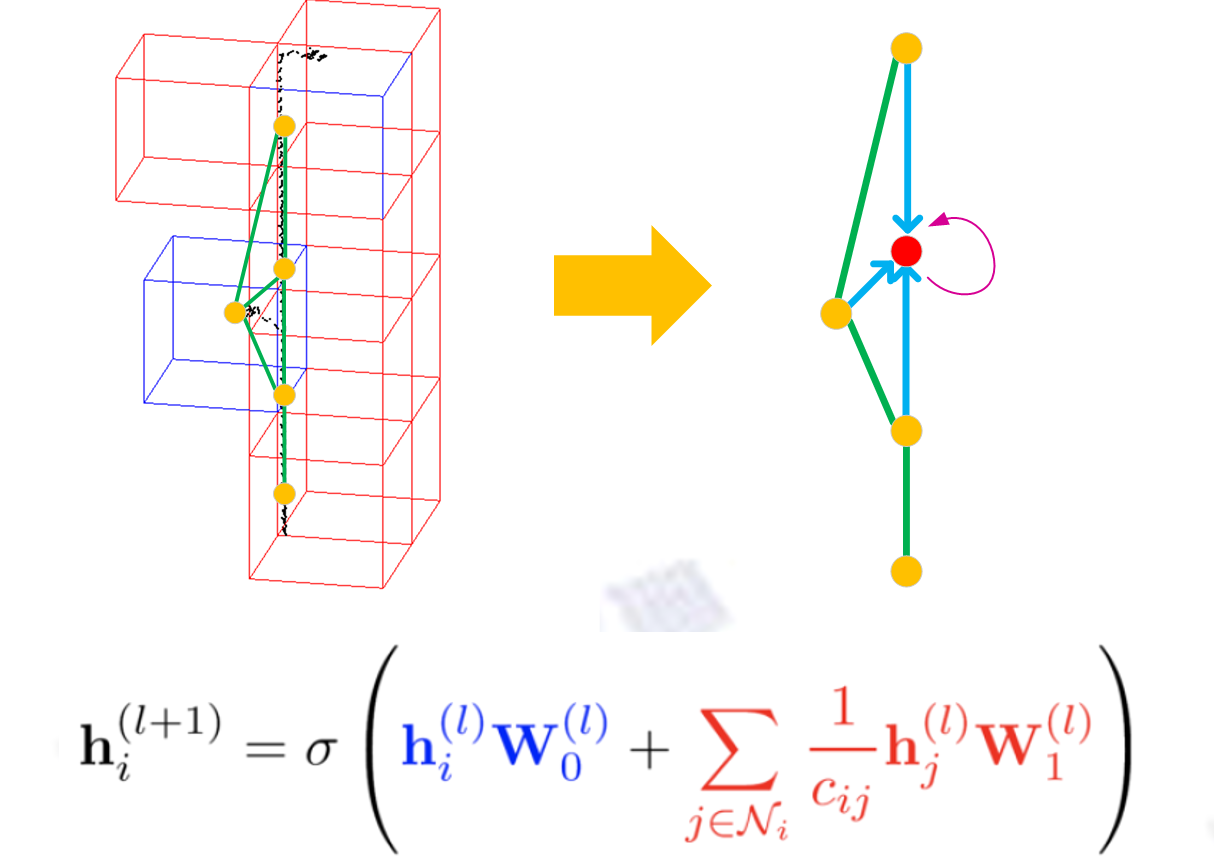
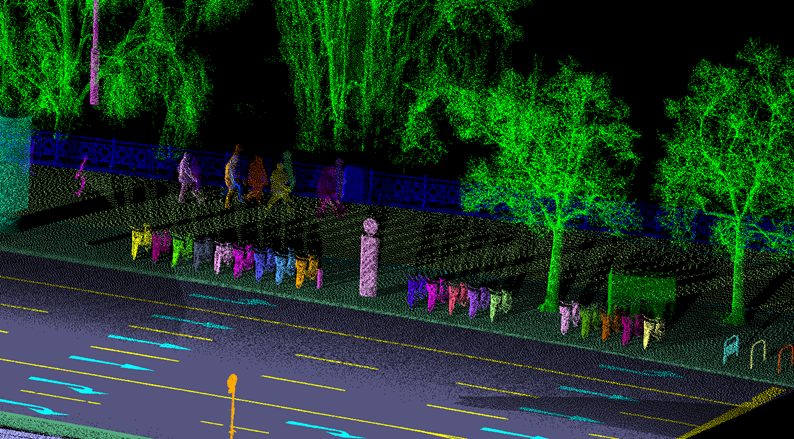
The scalable kernel for typical objects in street scenarios and the segmentation results of objects of different scales.
More details will be in our coming publications.