Scene Understanding
Scene understanding with point cloud and image data collected by mobile laser scanning (MLS) system.
– Background
This is a three-year project supported by the Chinese Academy of Sciences (CAS) for young researchers between 2020 and 2022. The goal is to derive methods on effective scene segmentation and understanding in road scenarios by assimilating point cloud and images collected by MLS systems.
Currently, we have reached a milestone and many exciting results have been obtained.
We demonstrated our method in two scenarios, i.e. an urban street in Vienna, Austria and a stretch of highway at Delft respectively, the Netherlands, using data sets collected by MLS systems.
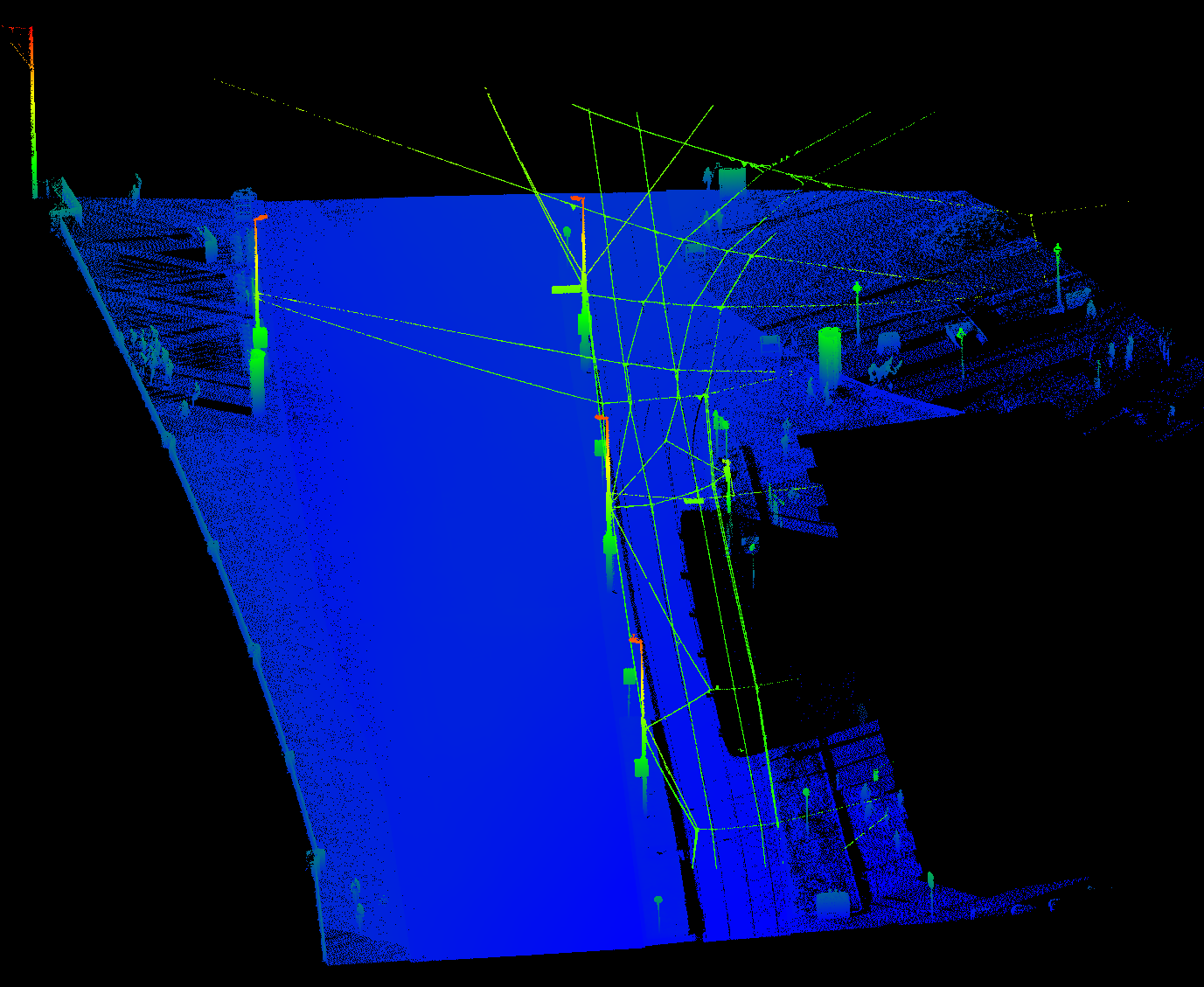
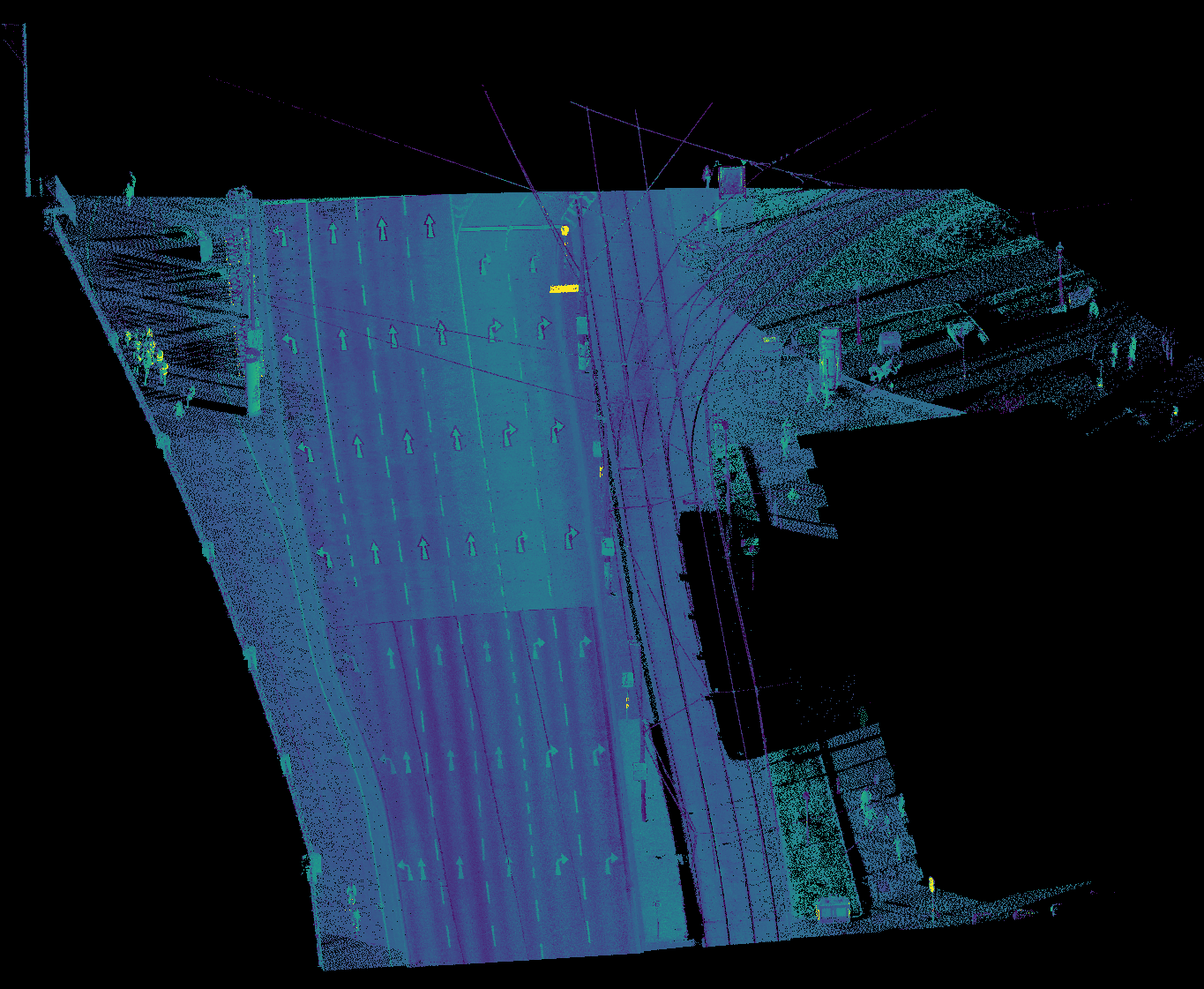
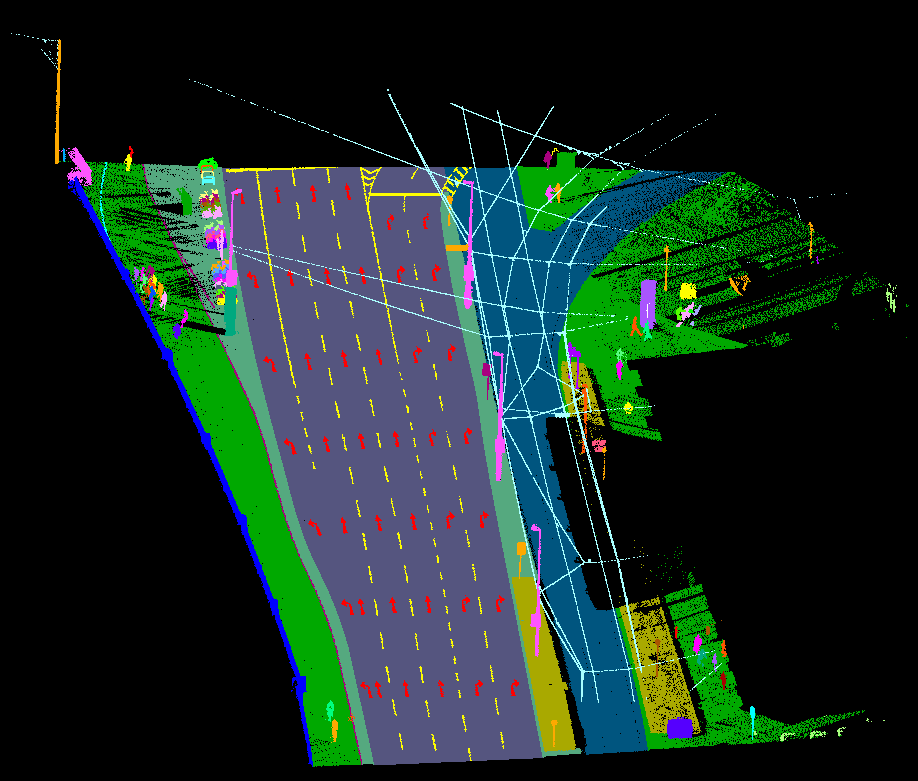
– 1. Urban street scenario
The input of the method for this scenario is point cloud (x, y, z and intensity) and image data collected by MLS system, as shown in the figures below.

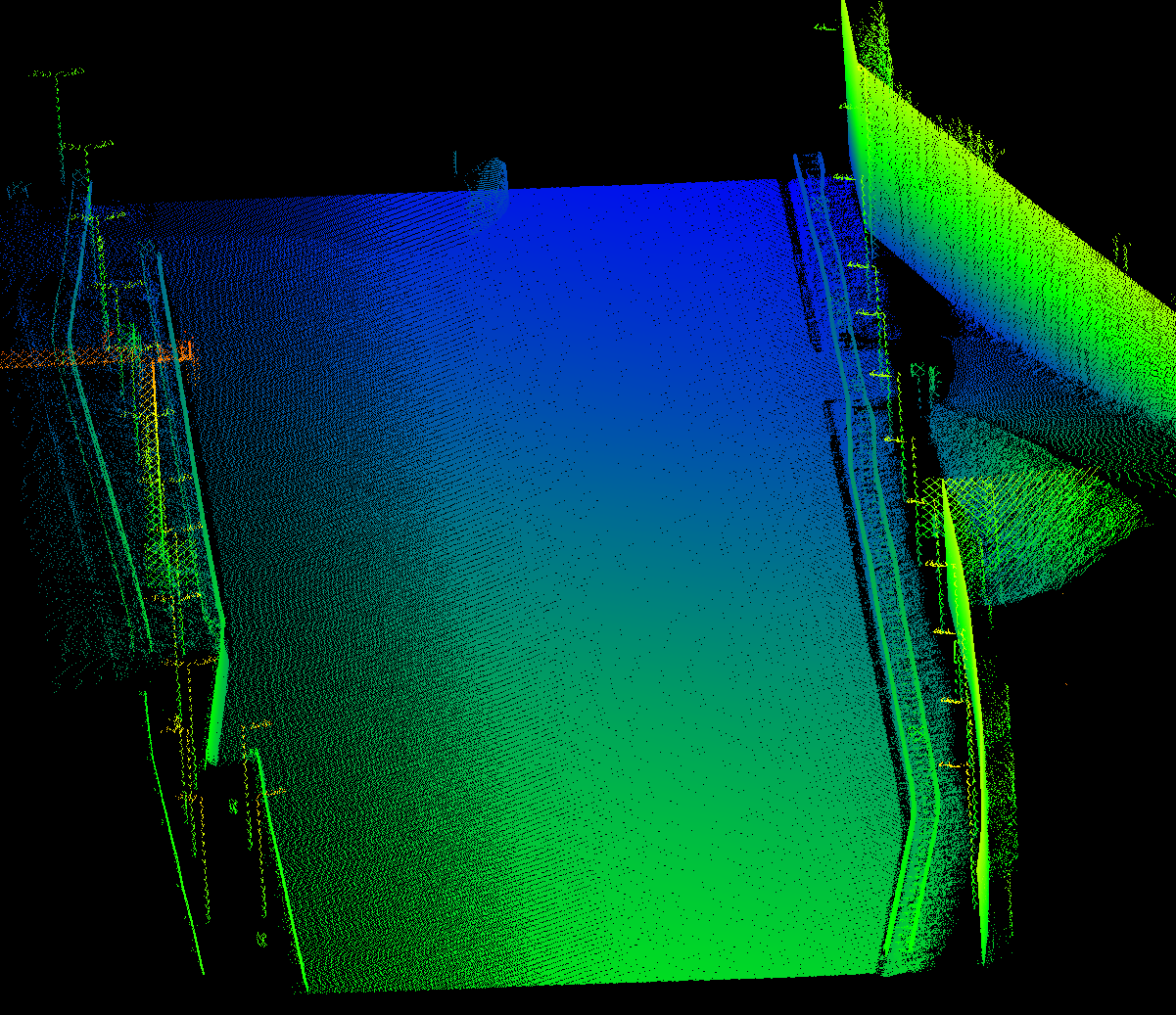
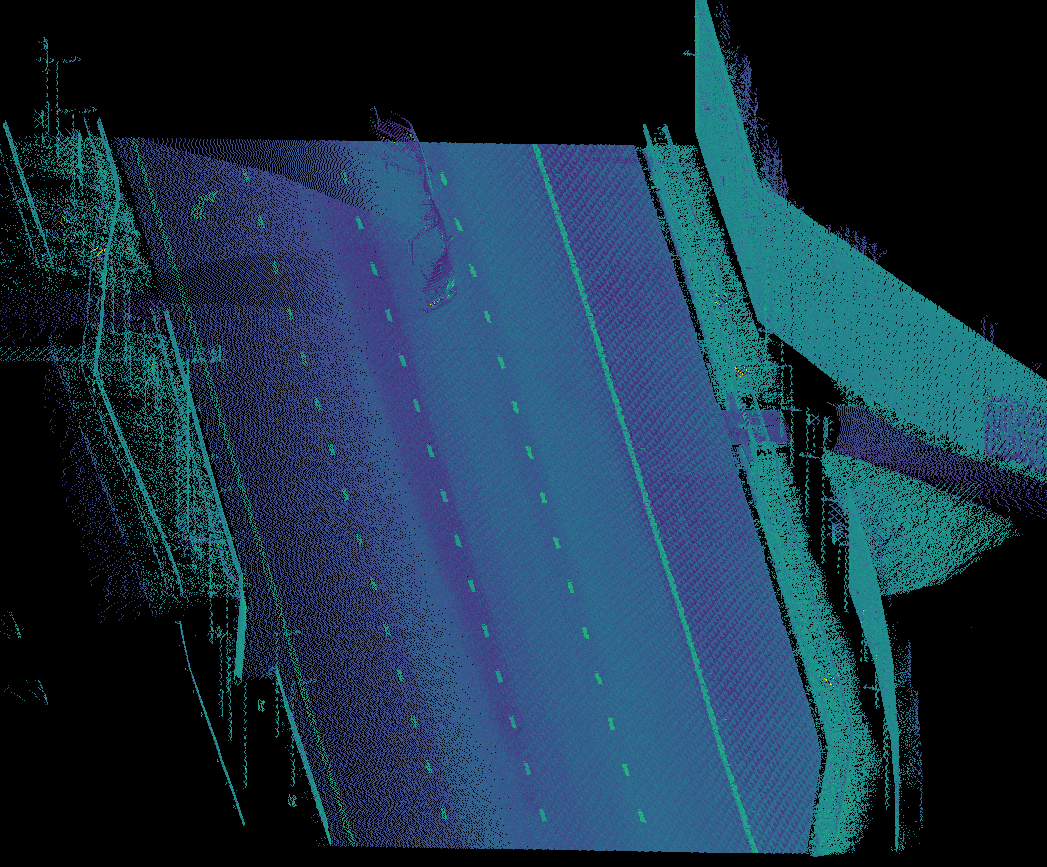
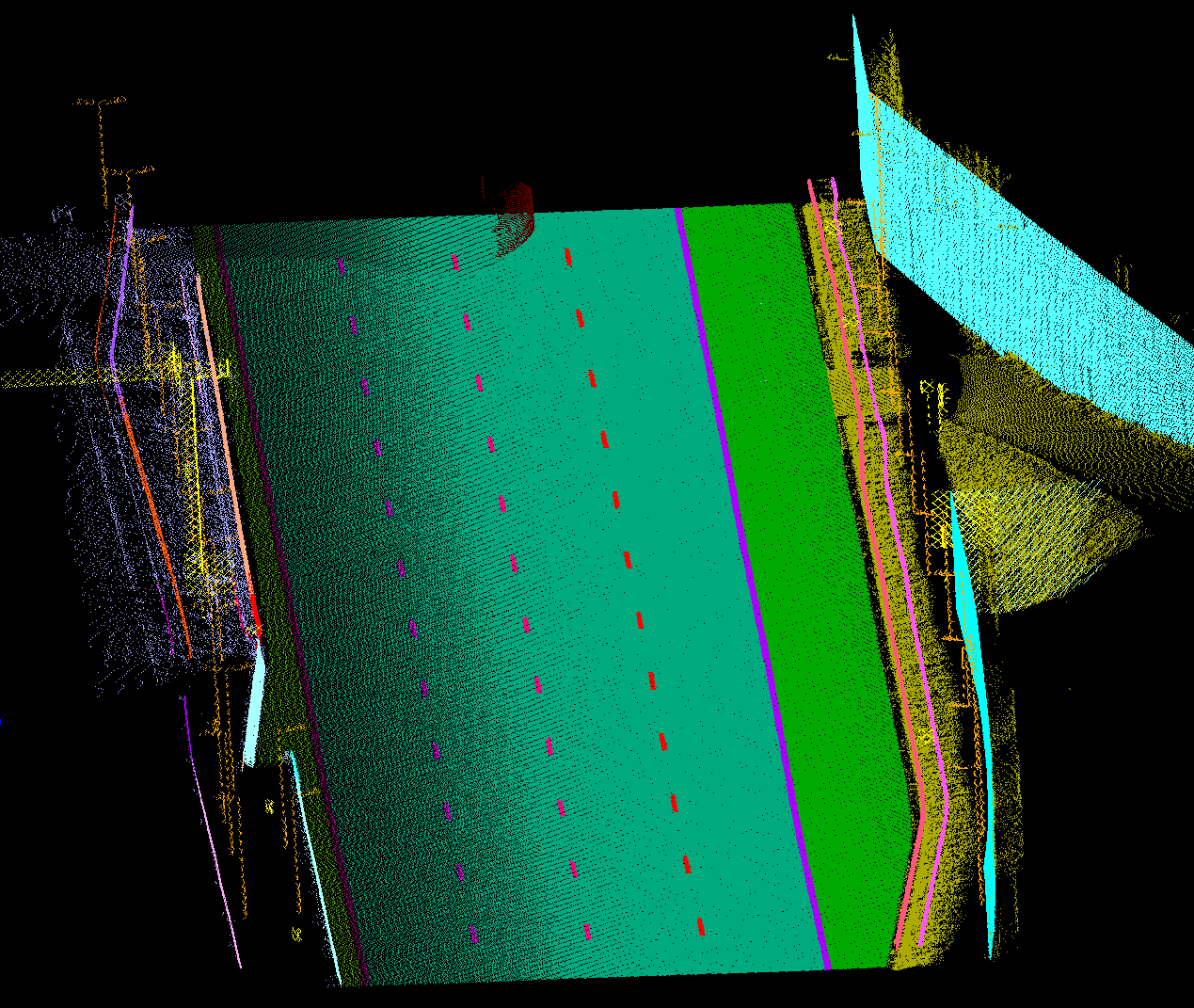
– 2. Highway scenario
Since a highway scenario is much simpler than an urban street scenario, the input of the model is only point cloud (x, y, z and intensity) collected by MLS system, as shown in the figures below.